



I. Introduction▲
Mettre en mouvement des choses consomme beaucoup d'ûˋnergie. Les moteurs nûˋcessitent gûˋnûˋralement plus de courant que ce que l'Arduino peut fournir. Certains moteurs nûˋcessitent aussi une tension plus ûˋlevûˋe. Pour commencer û tourner, en particulier quand il a une charge lourde attachûˋe, un moteur consommera autant de courant que possible. L'Arduino ne peut fournir que 40 milliampû´res (mA) û partir de ses broches numûˋriques, beaucoup moins que ce dont la plupart des moteurs ont besoin pour travailler.
II. Matûˋriels▲
|
|
|

|
|
|

|
|
|
RûSISTANCE 10ô köˋ |
DIODE 1N4007 |
MOSFET |
INTERRUPTEUR |
MOTEUR DC |
CONNECTEUR PILE 9ô V |
PILE |
|
x1 |
x1 |
x1 |
x1 |
x1 |
x1 |
x1 |
 |
Les transistors sont des composants qui vous permettent de contrûÇler les sources d'alimentation en courant et une tension ûˋlevûˋe û partir des sorties û faible courant de l'Arduino. Il existe beaucoup de types diffûˋrents, mais ils fonctionnent tous sur le mûˆme principe. Vous pouvez imaginer que les transistors sont des interrupteurs numûˋriques. Lorsque vous fournissez une tension û une des broches du transistor, appelûˋe la Grille, il ferme le circuit entre les deux autres broches, appelûˋes la Source et le Drain. De cette faûÏon, vous pouvez mettre en marche ou arrûˆter un moteur nûˋcessitant une grande valeur de courant/tension avec votre Arduino. |
 |
Les moteurs sont des dispositifs de type inductif. L'induction est un processus par lequel la variation du courant ûˋlectrique dans un fil entraûÛne une variation du champ magnûˋtique autour de ce fil. Lorsqu'un moteur ûˋlectrique est alimentûˋ en ûˋlectricitûˋ, une bobine de cuivre ûˋtroitement enroulûˋe û l'intûˋrieur du boûÛtier crûˋe le champ magnûˋtique. Ce champ entraûÛne alors la rotation de l'arbre du moteur (la partie qui dûˋpasse du boûÛtier). |
III. Construire le circuit▲
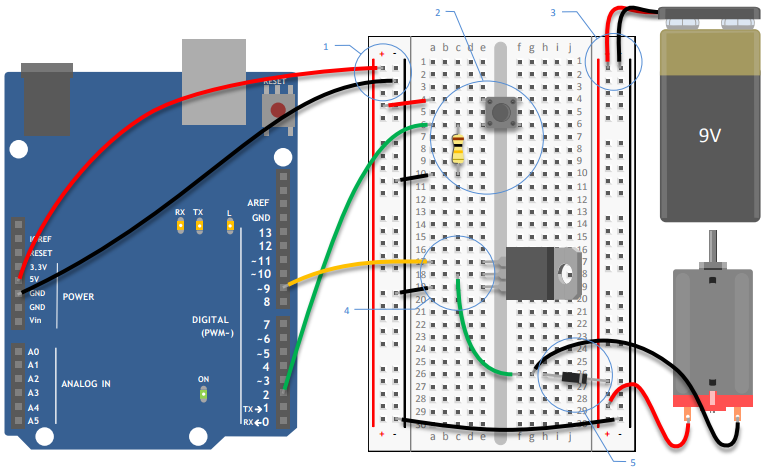
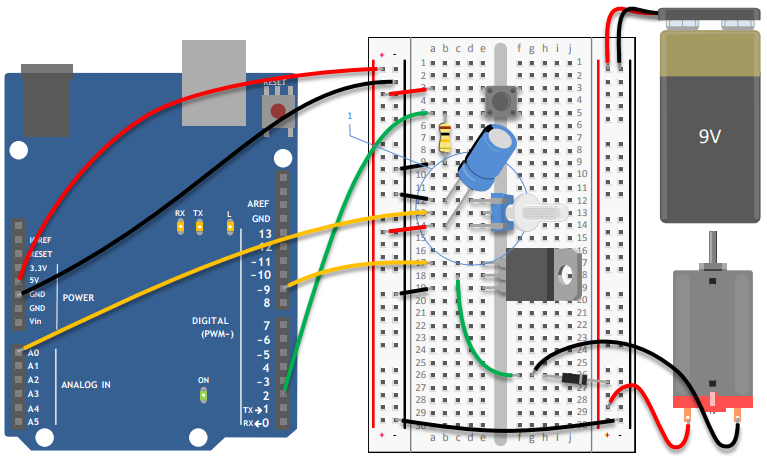
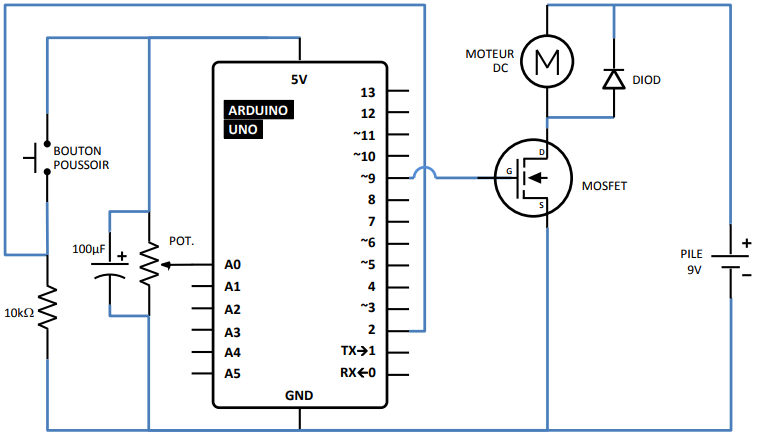
- Branchez l'alimentation et la masse û votre platine d'expûˋrimentation û partir de l'Arduino.
- Ajoutez un bouton poussoir û la carte, en connectant un cûÇtûˋ û l'alimentation et l'autre cûÇtûˋ û la broche numûˋrique 2 de l'Arduino. Ajouter une rûˋsistance ô¨ô pull-downô ô£ de 10ô köˋ entre la masse et la broche de l'interrupteur connectûˋe û l'Arduino.
- Lorsque vous utilisez des circuits avec diffûˋrentes tensions, vous devez connecter leur masse ensemble pour crûˋer une masse commune. Branchez le connecteur de pile 9ô V û la platine d'expûˋrimentation. Connectez la masse de la pile (pûÇle -) û la masse de votre Arduino sur la platine d'expûˋrimentation avec un cavalier, comme le montre la figure du circuit ci-dessus. Ensuite, branchez l'autre borne de la pile (pûÇle +) au 9ô V sur la platine d'expûˋrimentation.
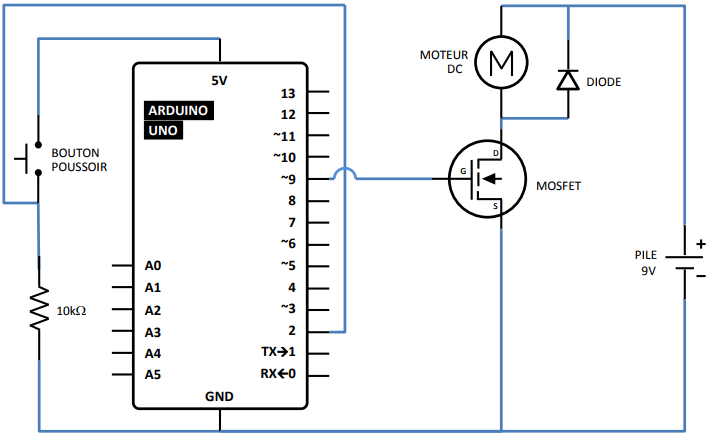
- Placez le transistor sur la carte. Placez le composant de sorte que la languette mûˋtallique soit face û vous, û l'opposûˋ de l'Arduino. Connectez la broche numûˋrique 9 û la broche û gauche sur le transistor. Cette borne est appelûˋe la Grille. Une variation de la tension sur la Grille assure une liaison entre les deux autres broches. Connectez une extrûˋmitûˋ du moteur û la broche intermûˋdiaire du transistor. Cette borne est appelûˋe le Drain. Lorsque l'Arduino active le transistor en appliquant une tension sur la Grille, cette borne sera connectûˋe û la troisiû´me borne, appelûˋe la Source. Connectez la source û la masse.
- Ensuite, connectez les fils d'alimentation du moteur au moteur û la platine d'expûˋrimentation. Le dernier composant û ajouter est la diode. La diode est un composant polarisûˋ, il ne peut ûˆtre montûˋ que dans un sens dans le circuit. Remarquons que la diode possû´de une bande û une extrûˋmitûˋ. Cette extrûˋmitûˋ est la broche nûˋgative, ou cathode, de la diode. L'autre extrûˋmitûˋ est la broche positive, ou anode. Connecter l'anode de la diode û la masse du moteur et la cathode de la diode û l'alimentation 9 V du moteur. Voir la figure du circuit ci-dessus. Cela peut sembler ûˆtre û l'envers, et en fait, ûÏa l'est. La diode servira û empûˆcher que la tension inverse gûˋnûˋrûˋe par le moteur retourne dans votre circuit. Rappelez-vous, la tension inverse circule dans le sens inverse de la tension que vous fournissez.
 |
Les LEDs sont aussi des diodes, au cas oû¿ vous vous demanderiez pourquoi leurs broches sont aussi appelûˋes anodes et cathodes. Il y a quantitûˋ de types de diodes, mais elles partagent toutes la mûˆme caractûˋristique. Elles permettent au courant de circuler de l'anode vers la cathode, mais pas l'inverse. |
IV. Le programme▲
- Dûˋfinissez les constantes et les variables
Avant tout, dûˋfinissez les constantes correspondant û la broche d'ûˋtat de l'interrupteur switchPin (interrupteurBroche) et celle de commande du moteur motorPin (moteurBroche), ainsi qu'une variable switchState (interrupteurEtat) qui stockera l'ûˋtat de l'interrupteur.
2.
3.
const int switchPin = 2;
const int motorPin = 9;
int switchState = 0;
- Dûˋclarer le mode d'utilisation des broches
Dans le setup(), dûˋclarer le pinMode() des broches du moteur (OUTPUT) et de l'interrupteur (INPUT).
2.
3.
4.
void setup() {
pinMode(switchPin, INPUT);
pinMode(motorPin, OUTPUT);
}
- Lire l'entrûˋe, et placer la sortie û l'ûˋtat haut si l'interrupteur est appuyûˋ
La fonction loop() est simple. Vûˋrifier l'ûˋtat de la broche switchPin avec digitalRead().
Si l'interrupteur est appuyûˋ, mettre la broche motorPin û l'ûˋtat haut (HIGH). S'il n'est pas appuyûˋ, mettre la broche û l'ûˋtat bas (LOW). û l'ûˋtat HIGH, le transistor est activûˋ, on dit qu'il est passant, le circuit alimentant le moteur est fermûˋ, donc il tourne. û l'ûˋtat LOW, le transistor n'est pas activûˋ, on dit qu'il est bloquant, le circuit alimentant le moteur est ouvert, il ne tourne donc pas.
2.
3.
4.
5.
6.
7.
8.
void loop() {
switchState = digitalRead(switchPin);
if (switchState == HIGH) {
digitalWrite(motorPin, HIGH);
} else {
digitalWrite(motorPin, LOW);
}
}
|
|
Les moteurs ont une valeur optimale de leur tension de fonctionnement. Ils pourront fonctionner dû´s que la tension atteint 50ô % de cette valeur et jusqu'û 50ô % au-delû de cette valeur. Si vous faites varier la tension, vous pourrez modifier la vitesse û laquelle le moteur tourne. Cependant, ne le faites pas varier au-delû de la limite, ou vous pourriez griller votre moteur. |
 |
Les transistors sont des composants statiques, c'est-û -dire qu'ils n'ont pas de parties mobiles. GrûÂce û cette caractûˋristique, vous pouvez les activer et les ûˋteindre trû´s rapidement. Essayez de brancher un potentiomû´tre û une entrûˋe analogique et d'utiliser la valeur lue pour piloter la broche PWM qui pilote le transistor. Que pensez-vous qu'il arrivera û la vitesse de rotation du moteur si vous faites varier sa tension d'alimentationô ? Avec les illustrations sur votre disque tournant, pouvez-vous obtenir diffûˋrents effets visuelsô ? |
V. Utiliser le montage▲
Assemblez le support CD comme illustrûˋ û l'ûˋtape 1, et fixez-le au moteur comme illustrûˋ û l'ûˋtape 2. Fixez la forme prûˋdûˋcoupûˋe û un CD comme indiquûˋ û l'ûˋtape 3. Clipsez le CD au support et sûˋcurisez le tout avec une pointe de colle. Laissez sûˋcher avant de continuer. Branchez une pile 9 V au connecteur de pile 9 V. Alimentez l'Arduino via le port USB. Lorsque vous appuierez sur l'interrupteur situûˋ sur la platine d'expûˋrimentation, le moteur se mettra û tourner trû´s rapidement.
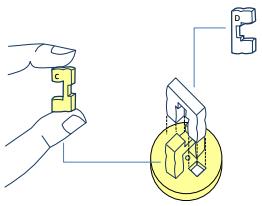 |
1. Insûˋrez l'ûˋlûˋment C dans l'ûˋlûˋment B, et enfichez doucement l'ûˋlûˋment D par-dessus. |
|
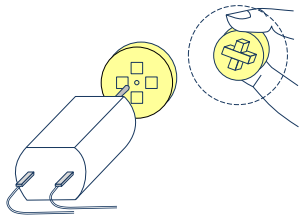
2. Insûˋrez l'axe du moteur dans le trou situûˋ û l'arriû´re de l'ûˋlûˋment B. |
 |
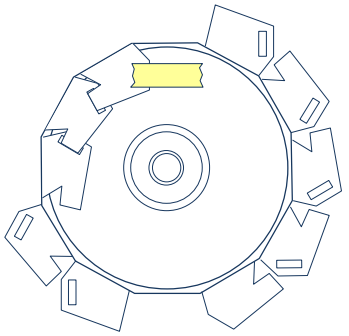 |
3. Placez la forme prûˋdûˋcoupûˋe en papier sur un CD et rabattez les volets vers l'arriû´re pour solidariser l'ensemble. |
|
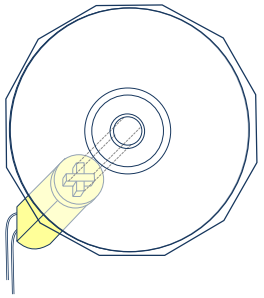
4. Fixez le CD û la croix formûˋe par les ûˋlûˋments C et D. Utilisez une pointe de colle pour empûˆcher le CD de se dûˋtacher. |
 |
 |
Le moteur tournant trû´s rapidement, vous pourrez probablement aussi fabriquer une grande hûˋlice. Attention cependant û ce qu'elle ne se dûˋtache pas et blesse quelqu'un. Essayez diffûˋrentes formes et illustrations et comparez les effets visuels obtenus. |
VI. Complûˋter le circuit▲
- Ajoutez un potentiomû´tre sur la plaque d'expûˋrimentation, et connectez une des broches sur le cûÇtûˋ û la masse et celle de l'autre cûÇtûˋ au +5ô V. Un potentiomû´tre est en quelque sorte un pont diviseur de tension. Lorsque vous tournez le bouton, vous modifiez le ratio de tension entre la broche centrale du potentiomû´tre et l'alimentation. Vous pouvez lire cette modification sur une entrûˋe analogique. Connectez la broche centrale û la broche de l'entrûˋe analogique A0. Cela permettra de contrûÇler la vitesse de rotation du moteur.
Placez un condensateur de 100ô ôçF entre les broches du potentiomû´tre reliûˋes û la masse et l'alimentation. Ce condensateur est appelûˋ ô¨ô condensateur de dûˋcouplageô ô£ parce qu'il rûˋduit, ou dûˋcouple, les modifications causûˋes par les composants du reste du circuit. Soyez trû´s prudent et assurez-vous que vous avez connectûˋ la cathode û la masse (c'est le cûÇtûˋ avec une bande noire) et l'anode û l'alimentation. Si vous mettez le condensateur û l'envers, il pourrait exploser.
VII. Le programme complet▲
- Dûˋfinissez les constantes et les variables
Le programme est similaire au programme prûˋcûˋdent, vous allez simplement modifier l'utilisation de l'interrupteur et ajouter le pilotage de la vitesse du moteur via le potentiomû´tre.
Le moteur restera allumûˋ ou ûˋteint entre deux pressions sur l'interrupteur permettant de libûˋrer vos mains pour manipuler le potentiomû´tre.
Le potentiomû´tre permettra de mettre en marche le moteur û partir d'une valeur limite permettant de dûˋlivrer une tension minimale au moteur, compatible avec sa tension minimale de dûˋmarrage.
Le programme permet de calibrer les positions ô¨ô Minô ô£ et ô¨ô Maxô ô£ du potentiomû´tre pendant cinq secondes aprû´s le dûˋmarrage du montage. La LED ô¨ô Lô ô£ reste allumûˋe pendant ce laps de temps.
Enfin, les valeurs lues sur les broches du potentiomû´tre et la valeur correspondante transmise au moteur sont affichûˋes dans la console Sûˋrie.
Avant tout, dûˋfinissez les constantes correspondant û la broche d'ûˋtat de l'interrupteur switchPin (interrupteurBroche), celle de commande du moteur motorPin (moteurBroche), celle de la LED ô¨ô Lô ô£ LEDPin (LEDBroche), et celle du potentiomû´tre potPin (potentiometreBroche).
2.
3.
4.
5.
// Pins
const int switchPin = 2;
const int motorPin = 9;
const int LEDPin = 13; // LED 'L' intûˋgrûˋe
const int potPin = A0;
Ensuite, dûˋfinissez les constantes correspondant û la vitesse du moteur lorsque le potentiomû´tre est en position ô¨ô Maxô ô£ motMax (moteurMax), û la valeur de dûˋmarrage du moteur motThreshold (moteurSeuil), et û la durûˋe en milliseconde (ms) de la pûˋriode de calibrage du potentiomû´tre calibrationTime (calibrageTemps).
2.
3.
4.
// Constants
const int motMax = 150; // vitesse maximale du moteur [0 - 255]
const int motThreshold = 20; // vitesse dûˋmarrage du moteur [0 - 255]
const int calibrationTime = 5000; // durûˋe en ms
Enfin, initialisez les autres variables nûˋcessaires au fonctionnement du programme.
Premiû´rement, les valeurs analogiques potMin et potMax qui contiendront, aprû´s le calibrage du potentiomû´tre, les valeurs des positions 'Min' et 'Max' du potentiomû´tre, puis potValue et motorValue, qui contiendront respectivement la valeur lue sur le potentiomû´tre et celle transmise au moteur.
2.
3.
4.
5.
// Variables
int potMin = 1023; // valeur minimale du calibrage du potentiomû´tre
int potMax = 0; // valeur maximale du calibrage du potentiomû´tre
int potValue = 0;
int motorValue = 0;
Deuxiû´mement, les valeurs numûˋriques LEDstate (LEDEtat), qui dûˋterminera si la LED 'L' est allumûˋe ou ûˋteinte, switchState (interrupteurEtat) qui contient l'ûˋtat actuel de l'interrupteur, et previousSwitchState (precedentInterrupteurEtat) qui contient l'ûˋtat de l'interrupteur lors de la prûˋcûˋdente lecture.
2.
3.
int LEDState = LOW;
int previousSwicthState = LOW;
int switchState = LOW;
- Dûˋclarer le mode d'utilisation des broches
Dans le setup(), ouvrez la liaison sûˋrie et dûˋclarez le pinMode() des broches du moteur (OUTPUT), de la LED (OUTPUT), du potentiomû´tre (INPUT) et de l'interrupteur (INPUT).
2.
3.
4.
5.
6.
7.
8.
void setup() {
Serial.begin(9600);
pinMode(switchPin, INPUT );
pinMode(motorPin , OUTPUT);
pinMode(potPin , INPUT );
pinMode(LEDPin , OUTPUT);
Ensuite, effectuez le calibrage du potentiomû´tre.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
// Calibrage durant les cinq premiû´res secondes
// Allumer la LED 'L'
digitalWrite(LEDPin, HIGH);
while (millis() < calibrationTime ) {
potValue = analogRead(potPin);
// Enregistrer la valeur maximale du potentiomû´tre
if (potValue > potMax) {
potMax = potValue;
}
// Enregistrer la valeur minimale du potentiomû´tre
if (potValue < potMin) {
potMin = potValue;
}
}
// Eteindre la LED 'L'
digitalWrite(LEDPin, LOW);
}
- Lire l'entrûˋe sur le potentiomû´tre, et placer la sortie û l'ûˋtat correspondant si l'interrupteur a ûˋtûˋ appuyûˋ.
Dans la fonction loop(), vûˋrifier l'ûˋtat de la broche switchPin avec digitalRead() afin de dûˋterminer si l'interrupteur a changûˋ de position depuis la derniû´re vûˋrification.
Si l'interrupteur est enfoncûˋ, changer l'ûˋtat du moteur. S'il ûˋtait arrûˆtûˋ, mettre la broche motorPin û l'ûˋtat haut (HIGH), s'il ûˋtait dûˋmarrûˋ, mettre la broche û l'ûˋtat bas (LOW). û l'ûˋtat HIGH, le transistor est activûˋ, on dit qu'il est passant, le circuit alimentant le moteur est fermûˋ, donc il tourne. û l'ûˋtat LOW, le transistor n'est pas activûˋ, on dit qu'il est bloquant, le circuit alimentant le moteur est ouvert, il ne tourne donc pas. La LED 'L' reflû´te l'ûˋtat du moteurô : allumûˋe, le moteur est en marcheô ; ûˋteinte, le moteur est arrûˆtûˋ.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
void loop() {
switchState = digitalRead(switchPin);
// Si l'ûˋtat du bouton est changûˋ (ON/OFF), on change l'ûˋtat du moteur (STOP/START)
if (previousSwicthState != switchState) {
previousSwicthState = switchState;
if (switchState == HIGH) { // Le bouton est pressûˋ
if (LEDState == HIGH) {
LEDState = LOW; // Le moteur est û prûˋsent ûˋteint
analogWrite(motorPin,0);
} else {
LEDState = HIGH; // Le moteur est û prûˋsent allumûˋ
}
digitalWrite(LEDPin, LEDState);
}
}
Ainsi, la variable d'ûˋtat de la LED est aussi utilisûˋe pour dûˋterminer si le moteur est en marche.
Dans ce cas, vûˋrifier la valeur de la broche potPin avec analogRead() afin de dûˋterminer la position du potentiomû´tre potValue entre [potMin,potMax], et calculer la valeur de la tension û envoyer au moteur sur la plage [0, motMax].
Ces deux valeurs sont affichûˋes sur la liaison sûˋrie.
Par prûˋcaution, afin de n'endommager ni la pile 9 V, ni le moteur, si la valeur calculûˋe pour alimenter le moteur est infûˋrieure û la valeur minimale permettant au moteur de dûˋmarrer, la valeur est forcûˋe û 0 afin de laisser le moteur û l'arrûˆt. De mûˆme, si la valeur calculûˋe est en dehors des limites admises par Arduino [0, 255], la valeur est repositionnûˋe dans l'intervalle.
Enfin, la valeur est envoyûˋe via analogWrite() û la broche motorPin.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
// PWM
if (LEDState == HIGH) {
potValue = analogRead(potPin);
motorValue = map(potValue,potMin,potMax,0,motMax);
Serial.print("Potentiometre : ");
Serial.print(potValue);
Serial.print(" / Moteur : ");
Serial.println(motorValue);
// Au cas oû¿ la valeur du moteur est infûˋrieure û la valeur minimale de dûˋmarrage
if (motorValue<motThreshold) {
motorValue = 0;
}
// Au cas oû¿ la valeur du moteur est en dehors de la plage de fonctionnement obtenue pendant le calibrage
motorValue = constrain(motorValue, 0, 255);
analogWrite(motorPin,motorValue);
}
}
VIII. Note de la rûˋdaction▲
Ce tutoriel est une traduction du livret d'accompagnement du kit de dûˋmarrage (document original disponible en licence Creative Commons BY-NC-SA) disponible sur le site http://astenor.free.fr/Arduino/. Le kit comprend une sûˋlection de composants ûˋlectroniques les plus courants et les plus utiles, accompagnûˋe d'un livre de 15 projets. Depuis les bases de l'ûˋlectronique, jusqu'û des projets plus complexes et intûˋressants, le kit vous aidera û contrûÇler notre monde physique avec des capteurs et des actionneurs.
