



I. Introduction▲
Dans le projet avec la roue multicolore motorisﺣ۸e, vous aviez un moteur ne tournant que dans un seul sens. Si vous aviez interverti les fils d'alimentation et de masse aux bornes du moteur, le moteur aurait alors tournﺣ۸ dans le sens opposﺣ۸. Il n'est vraiment pas pratique de devoir effectuer cette modification ﺣ chaque fois que vous voulez faire tourner quelque chose dans un sens diffﺣ۸rent. C'est pourquoi nous allons utiliser un composant appelﺣ۸ ﺡ،ﺡ Pont en Hﺡ ﺡﭨ qui inversera pour nous la polaritﺣ۸ aux bornes du moteur.
II. Matﺣ۸riels▲
|
|
|

|
|
|

|

|
|
RﺣSISTANCE |
POTENTIOMﺣTRE |
PONT |
BOUTON |
MOTEUR CC |
BORNIER PILE |
PILE |
|
x2 |
x1 |
x1 |
x2 |
x1 |
x1 |
x1 |
 |
Les structures ﺣ۸lectroniques avec ponts en H existent sous forme de circuits intﺣ۸grﺣ۸s (Integrated Circuitsﺡ : IC). Ce genre de puces peuvent contenir des circuits complexes avec des composants ﺣ۸lectroniques de base dans un volume minuscule. Ils peuvent aider ﺣ simplifier l'utilisation de circuits plus complexes en les intﺣ۸grant dans des composants aisﺣ۸ment remplaﺣ۶ables. Par exemple, le pont en H que vous allez utiliser dans ce projet contient de nombreux transistors. Pour construire le circuit contenu dans le pont en H, vous auriez probablement eu besoin d'une autre platine d'expﺣ۸rimentation. |
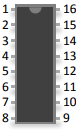 |
Avec une puce ﺣ۸lectronique, l'accﺣ۷s aux circuits qu'elle contient s'effectue grﺣ۱ce aux broches situﺣ۸es sur son pourtour. Chaque puce peut avoir un nombre de broches diffﺣ۸rent, et toutes les broches ne seront pas nﺣ۸cessairement utilisﺣ۸es dans tous les circuits. Il est quelquefois plus pratique de dﺣ۸signer une broche par son numﺣ۸ro plutﺣﺑt que par sa fonction. Lorsque vous regardez le boﺣ؟tier d'une puce, la partie possﺣ۸dant une encoche est considﺣ۸rﺣ۸e comme le haut. Vous pouvez alors identifier le numﺣ۸ro des broches en commenﺣ۶ant ﺣ compter ﺣ partir du coin en haut ﺣ gauche puis en suivant le sens d'un ﺡ،ﺡ Uﺡ ﺡﭨ comme illustrﺣ۸ sur la figure ci-contre. |
III. Construire le circuit▲
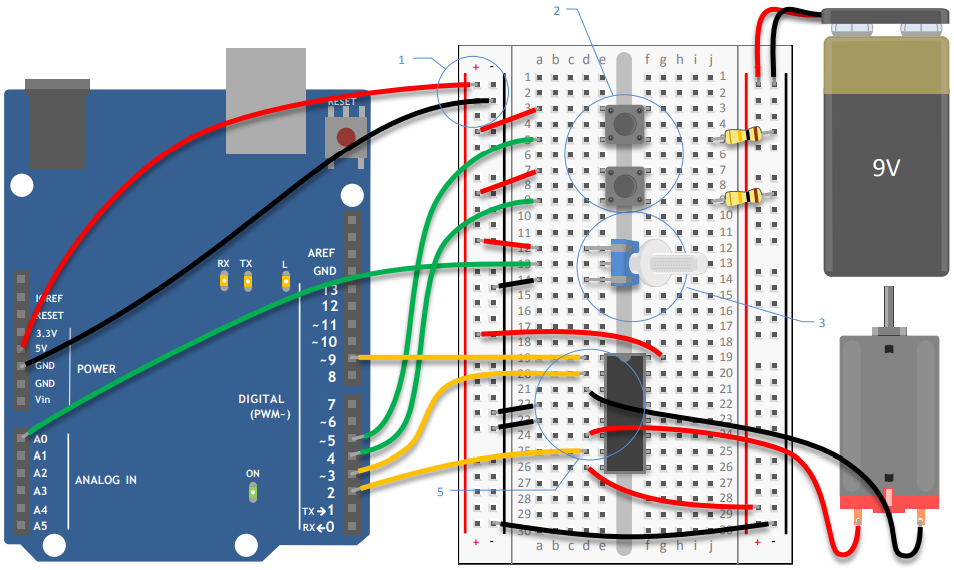
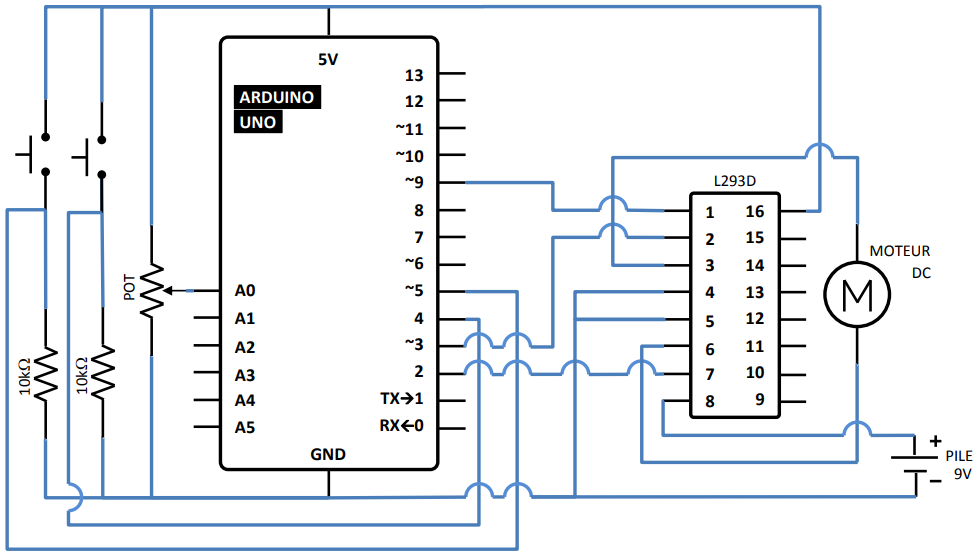
- Branchez l'alimentation et la masse ﺣ votre platine d'expﺣ۸rimentation ﺣ partir de l'Arduino.
- Ajoutez deux boutons-poussoirs sur la platine, et connectez l'un des cﺣﺑtﺣ۸s de chaque bouton ﺣ l'alimentation. Ajouter une rﺣ۸sistance ﺡ،ﺡ pull-downﺡ ﺡﭨ de 10ﺡ kﺳ۸ en sﺣ۸rie avec la masse sur l'autre cﺣﺑtﺣ۸ de chacun des boutons.
Le bouton reliﺣ۸ ﺣ la broche 4 contrﺣﺑlera la direction, tandis que celui reliﺣ۸ ﺣ la broche 5 permettra d'allumer ou d'ﺣ۸teindre le moteur. - Connectez le potentiomﺣ۷tre ﺣ la platine. Cﺣ۱blez le 5ﺡ V d'un cﺣﺑtﺣ۸ et la masse de l'autre. Reliez la broche centrale ﺣ l'entrﺣ۸e analogique 0 de l'Arduino. Ce potentiomﺣ۷tre sera utilisﺣ۸ pour contrﺣﺑler la vitesse de rotation du moteur.
- Placez le pont en H sur votre platine de faﺣ۶on ﺣ ce qu'il enjambe le centre de la plaque (voir circuit pour le dﺣ۸tail sur sa position). Connectez la broche 1 du pont en H ﺣ la sortie numﺣ۸rique 9 de l'Arduino. C'est la broche d'activation du pont en H. Quand elle reﺣ۶oit 5ﺡ V, le moteur s'allume, quand elle reﺣ۶oit 0ﺡ V, le moteur s'ﺣ۸teint. Vous utiliserez cette broche pour commander le pont en H avec un signal modulﺣ۸ PWM, afin de rﺣ۸gler la vitesse de rotation du moteur.
- Connectez la broche 2 du pont en H ﺣ la sortie numﺣ۸rique 3 de l'Arduino. Connectez la broche 7 ﺣ la sortie numﺣ۸rique 2. Ce sont les broches que vous utiliserez pour communiquer avec le pont en H, et lui indiquer dans quelle direction faire tourner le moteur. Si la broche 3 est ﺣ l'ﺣ۸tat bas (LOW) et que la broche 2 est ﺣ l'ﺣ۸tat haut (HIGH), le moteur tournera dans un sens. Si la broche 2 est ﺣ l'ﺣ۸tat bas (LOW) et que la broche 3 est ﺣ l'ﺣ۸tat haut (HIGH), le moteur tournera dans l'autre sens. Si les deux broches sont ﺣ l'ﺣ۸tat haut (HIGH) ou bas (LOW) en mﺣ۹me temps, le moteur s'arrﺣ۹tera de tourner.
- Le pont en H est alimentﺣ۸ via sa broche 16, branchez-la au 5ﺡ V. Les broches 4 et 5 sont toutes les deux connectﺣ۸es ﺣ la masse.
- Reliez les bornes du moteur aux broches 3 et 6 du pont en H. Ces deux bornes seront alimentﺣ۸es en fonction des signaux que vous enverrez sur les broches 2 et 7 du pont en H.
- Branchez le bornier de la pile (sans que la pile y soit connectﺣ۸eﺡ !) ﺣ l'autre ligne d'alimentation de votre platine d'expﺣ۸rimentation. Connectez la masse de l'Arduino ﺣ la masse de la pile. Connectez la broche 8 du pont en H ﺣ l'alimentation de la pile. C'est via cette broche que le pont en H capte l'alimentation qu'il transmet au moteur. Assurez-vous que vous n'avez pas, par erreur, reliﺣ۸ les lignes des alimentations en 5ﺡ V et en 9ﺡ V. Ces lignes doivent absolument rester sﺣ۸parﺣ۸es. Seules les lignes de masse doivent ﺣ۹tre communes.
IV. Le programme▲
- Dﺣ۸finir les constantes et les variables
Crﺣ۸ez les constantes qui dﺣ۸finissent les broches d'entrﺣ۸e/sortieﺡ :
2.
3.
4.
5.
6.
const int controlPin1 = 2;
const int controlPin2 = 3;
const int enablePin = 9;
const int directionSwicthPin = 4;
const int onOffSwitchStateSwitchPin = 5;
const int potPin = A0;
- Crﺣ۸er les variables qui stockent les diffﺣ۸rents ﺣ۸tats du programme
Utilisez des variables pour conserver en mﺣ۸moire les valeurs de vos entrﺣ۸es. Vous dﺣ۸tecterez les changements de position des deux interrupteurs en comparant leurs ﺣ۸tats respectifs entre deux passages successifs dans la boucle principale. Aussi, en plus de stocker leur position courante dans les variables onOffSwitchState (EtatInterrupteurMarcheArrﺣ۹t) et directionSwitchState (EtatInterrupteurDirection), vous aurez besoin de conserver en mﺣ۸moire l'ﺣ۸tat prﺣ۸cﺣ۸dent de chacun des interrupteurs dans les variables previousOnOffSwitchState (EtatPrﺣ۸cﺣ۸dentInterrupteurMarcheArrﺣ۹t) et previousDirectionSwitchState (EtatPrﺣ۸cﺣ۸dentInterrupteurDirection).
2.
3.
4.
int onOffSwitchState = 0;
int previousOnOffSwitchState = 0;
int directionSwitchState = 0;
int previousDirectionSwitchState = 0;
- Crﺣ۸er les variables de commande du moteur
motorDirection (moteurDirection) garde une trace du sens de rotation du moteur, tandis que motorSpeed (moteurVitesse) garde une trace de la vitesse de rotation et motorEnabled (moteurActivﺣ۸) garde une trace de l'ﺣ۸tat d'alimentation du moteur (alimentﺣ۸ ou ﺣ۸teint).
2.
3.
int motorEnabled = 0;
int motorSpeed = 0;
int motorDirection = 0;
- Dﺣ۸clarer les broches numﺣ۸riques comme entrﺣ۸e ou sorties
Dans setup(), dﺣ۸finissez les directions de chacune des broches d'entrﺣ۸e et de sortie.
2.
3.
4.
5.
6.
void setup() {
pinMode(directionSwitchPin, INPUT);
pinMode(onOffSwitchStateSwitchPin, INPUT);
pinMode(controlPin1, OUTPUT);
pinMode(controlPin2, OUTPUT);
pinMode(enablePin, OUTPUT);
- ﺣteindre le moteur
Mettre la broche enablePin (activerBroche) ﺣ l'ﺣ۸tat bas (LOW) au dﺣ۸marrage de l'Arduino, afin que le moteur ne se mette pas ﺣ tourner.
8.
digitalWrite(enablePin, LOW);
}
- Lire les informations des capteurs
Dans votre loop(), lisez l'ﺣ۸tat de l'interrupteur Marche/Arrﺣ۹t et stockez-le dans la variable onOffSwitchState (EtatInterrupteurMarcheArrﺣ۹t). De mﺣ۹me, lisez l'ﺣ۸tat de l'interrupteur de changement de direction et stockez-le dans la variable directionSwitchState (EtatInterrupteurDirection). Enfin, lisez la valeur aux bornes du potentiomﺣ۷tre afin d'en dﺣ۸duire une consigne de vitesse pour le moteur que vous stockerez dans la variable motorSpeed (moteurVitesse).
2.
3.
4.
5.
void loop() {
onOffSwitchState = digitalRead(onOffSwitchStateSwitchPin);
delay(1);
directionSwitchState = digitalRead(directionSwitchPin);
motorSpeed = analogRead(potPin)/4;
- Vﺣ۸rifier si l'ﺣ۸tat de l'interrupteur Marche/Arrﺣ۹t a changﺣ۸
Il y a seulement deux ﺣ۸tats dans lesquels un moteur peut ﺣ۹treﺡ : Allumﺣ۸ ou ﺣteint. Ainsi, vous allez vouloir faire basculer la variable motorEnabled (moteurActivﺣ۸) alternativement entre ces deux ﺣ۸tats. Dans un test SI (if), le 0 est interprﺣ۸tﺣ۸ comme ﺣ۸tant la valeur FAUX et le 1 comme ﺣ۸tant la valeur VRAI. Nous voulons donc faire basculer alternativement la valeur de motorEnabled (moteurActivﺣ۸) de 0 ﺣ 1 et vice-versa. Une maniﺣ۷re de parvenir ﺣ ce rﺣ۸sultat est d'utiliser l'opﺣ۸rateur d'inversion ! Ainsiﺡ : motorEnabled = !motorEnabled. Cet opﺣ۸rateur ! permet d'inverser la valeur d'une variable de VRAI ﺣ FAUX et vice-versa, un peu comme le signe - fait passer d'une valeur positive ﺣ une valeur nﺣ۸gative.
S'il y a une diffﺣ۸rence entre l'ﺣ۸tat actuel de l'interrupteur et son ﺣ۸tat lu lors du passage prﺣ۸cﺣ۸dent dans la boucle, et que l'ﺣ۸tat actuel est haut (HIGH), mettre la variable motorEnabled (moteurActivﺣ۸) ﺣ 1 (VRAI, moteur Allumﺣ۸). Si c'est bas (LOW), mettre la variable ﺣ 0 (FAUX, moteur ﺣteint).
7.
8.
9.
10.
if (onOffSwitchState != previousOnOffSwitchState) {
if (onOffSwitchState == HIGH) {
motorEnabled = !motorEnabled;
}
}
- Vﺣ۸rifier si l'ﺣ۸tat de l'interrupteur Direction a changﺣ۸
Vﺣ۸rifiez si l'interrupteur Direction est dans une position diffﺣ۸rente de sa position lors du passage prﺣ۸cﺣ۸dent dans la boucle. Si elle est diffﺣ۸rente, modifiez la valeur de la variable stockant la Direction. Comme pour Marche/Arrﺣ۹t, il y a seulement deux sens dans lesquels un moteur peut tourner. Ainsi, vous allez vouloir faire basculer la variable alternativement dans deux ﺣ۸tats. Une maniﺣ۷re de parvenir ﺣ ce rﺣ۸sultat est d'utiliser l'opﺣ۸rateur d'inversion ! ainsiﺡ : motorDirection = !motorDirection.
12.
13.
14.
15.
if (directionSwitchState != previousDirectionSwitchState) {
if (directionSwitchState == HIGH) {
motorDirection = !motorDirection;
}
}
- Modifier la valeur de sortie de la broche pour faire tourner le moteur dans le bon sens
La variable motorDirection (moteurDirection) dﺣ۸termine dans quel sens le moteur tourne. Pour rﺣ۸gler la direction, vous dﺣ۸finissez l'ﺣ۸tat des broches de contrﺣﺑle, l'une ﺣ l'ﺣ۸tat haut (HIGH) et l'autre ﺣ l'ﺣ۸tat bas (LOW). Lorsque motorDirection change, inversez l'ﺣ۸tat des broches de contrﺣﺑle.
Lorsque le bouton-poussoir Direction est appuyﺣ۸, vous voulez faire tourner le moteur dans l'autre sens, il faut donc inverser l'ﺣ۸tat des broches controlPin1 et controlPin2.
17.
18.
19.
20.
21.
22.
if (motorDirection == 1) {
digitalWrite(controlPin1, HIGH);
digitalWrite(controlPin2, LOW);
} else {
digitalWrite(controlPin1, LOW);
digitalWrite(controlPin2, HIGH);
}
- Moduler la vitesse de rotation du moteur s'il est activﺣ۸
Si la variable motorEnabled (moteurActivﺣ۸) est ﺣ VRAI (1), dﺣ۸finissez la vitesse de rotation du moteur en utilisant analogWrite() pour envoyer un signal PWM ﺣ la broche d'Activation. Si motorEnabled (moteurActivﺣ۸) est ﺣ FAUX (0), alors ﺣ۸teignez le moteur en positionnant avec analogWrite la valeur sur cette broche ﺣ 0.
24.
25.
26.
27.
if (motorEnabled == 1) {
analogWrite(enablePin, motorSpeed);
} else {
analogWrite(enablePin, 0);
}
- Enregistrer les ﺣ۸tats courants avant le prochain passage dans la boucle loop()
Avant de sortir de loop(), stockez les ﺣ۸tats actuels des interrupteurs dans les variables stockant les ﺣ۸tats prﺣ۸cﺣ۸dents, pour prﺣ۸parer le prochain passage du programme dans la boucle loop().
29.
30.
previousDirectionSwitchState = directionSwitchState;
previousOnOffSwitchState = onOffSwitchState;
}
V. Utiliser le montage▲
Branchez l'Arduino ﺣ votre ordinateur. Branchez la pile sur son bornier. Lorsque vous presserez le bouton-poussoir Marche/Arrﺣ۹t, le moteur devrait commencer ﺣ tourner. Si vous tournez la tige du potentiomﺣ۷tre, vous devriez constater que le moteur accﺣ۸lﺣ۷re ou ralentit en fonction de la valeur lue aux bornes du potentiomﺣ۷tre. En pressant le bouton Marche/Arrﺣ۹t une seconde fois, le moteur s'arrﺣ۹tera. Essayez alors l'interrupteur de Direction et vﺣ۸rifiez que le moteur peut tourner dans les deux sens.
Une fois que vous aurez vﺣ۸rifiﺣ۸ que le circuit fonctionne correctement, dﺣ۸connectez la pile et le connecteur USB du circuit.
Afin de construire votre zootrope, vous devez prendre la ﺡ،ﺡ roue multicoloreﺡ ﺡﭨ utilisﺣ۸e dans le projet prﺣ۸cﺣ۸dent et dﺣ۸couper les fentes verticales dans le bandeau fourni avec votre kit. Une fois que le CD est emboﺣ؟tﺣ۸ de maniﺣ۷re sﺣ۸curisﺣ۸e sur le support en forme de croix fixﺣ۸ sur l'arbre du moteur, branchez ﺣ nouveau la pile et le connecteur USB. Tenez votre projet en hauteur, afin que vous puissiez regarder ﺣ travers les fentes (mais assurez-vous bien que le CD est suffisamment fixﺣ۸ sur le support en bois du moteur et qu'il ne risque pas de se dﺣ۸tacher. Aussi ne vous tenez pas trop prﺣ۷s du zootrope pour ne pas vous blesser). En activant l'interrupteur Marche/Arrﺣ۹t, vous devriez voir la sﺣ۸quence d'images fixes s'ﺡ،ﺡ animerﺡ ﺡﭨﺡ !
Si l'animation est trop rapide ou trop lente, tournez la tige du potentiomﺣ۷tre afin d'ajuster la vitesse de dﺣ۸filement des images.
Essayez d'appuyer sur le bouton poussoir de Direction afin de voir ﺣ quoi ressemble l'animation lorsqu'elle est passﺣ۸e ﺣ l'envers. Le zootrope et les images fournis avec le kit sont simplement un point de dﺣ۸partﺡ : essayez de produire vos propres animations, en utilisant le bandeau fourni comme modﺣ۷le.
Pour cela, commencez par dessiner une image simple. Ensuite, effectuez de petites modifications entre chacune des images suivantes. Enfin, essayez de graduellement revenir au dessin de l'image originale afin que vous puissiez jouer l'animation en boucle, sans coupure, indﺣ۸finiment.
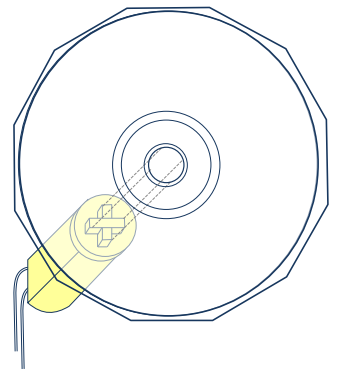 |
1. Fixez le CD sur le support en bois. Ajoutez une goutte de colle afin que le CD ne glisse pas au dﺣ۸marrage du moteur. |
|
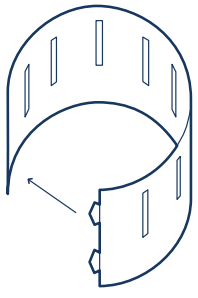
2. Utilisez les languettes pour fermer le bandeau, |
 |
 |
3. Insﺣ۸rez les quatre languettes sur la base du zootrope. |
|
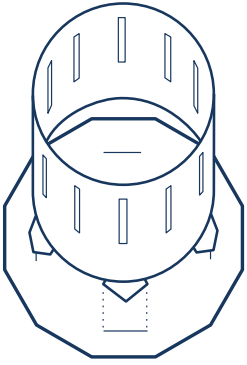
4. Insﺣ۸rez la bande de papier avec les images ﺣ l'intﺣ۸rieur du zootrope. |
 |
Les zootropes fonctionnent grﺣ۱ce ﺣ un phﺣ۸nomﺣ۷ne appelﺣ۸ ﺡ،ﺡ persistance rﺣ۸tinienneﺡ ﺡﭨ (Persistence of Vision en anglais, quelquefois abrﺣ۸gﺣ۸ en POV). La POV explique l'illusion du mouvement crﺣ۸ﺣ۸e lorsque nos yeux observent une succession rapide d'images fixes comportant d'infimes variations entre elles. Si vous entrez ﺡ،ﺡ POV displayﺡ ﺡﭨ sur un moteur de recherche, vous trouverez de trﺣ۷s nombreux projets crﺣ۸ﺣ۸s par des gens qui exploitent cet effet, et souvent ﺣ base de LED et d'un Arduino.
Construisez une base pour soutenir le moteur. Une boite de cartes ﺣ jouer avec une ouverture pratiquﺣ۸e sur le dessus pourra trﺣ۷s bien servir de base, permettant de libﺣ۸rer vos mains pour utiliser les boutons poussoirs et le potentiomﺣ۷tre. Cela rendra aussi plus simple la dﺣ۸monstration du rﺣ۸sultat de votre travail aux autres personnes.
Avec un peu de travail supplﺣ۸mentaire, vous pourrez permettre ﺣ votre zootrope de fonctionner mﺣ۹me dans la pﺣ۸nombre. Branchez une LED et une rﺣ۸sistance ﺣ l'une des broches de sortie numﺣ۸rique disponible sur l'Arduino. Ajoutez aussi un second potentiomﺣ۷tre, et connectez-le ﺣ une entrﺣ۸e analogique. Positionnez la LED de faﺣ۶on ﺣ ce qu'elle ﺣ۸claire directement les images. En utilisant l'entrﺣ۸e analogique pour dﺣ۸finir la frﺣ۸quence du flash produit par la LED, vous rﺣ۸glerez le systﺣ۷me afin que ce flash soit produit juste au moment oﺣﺗ l'image arrive devant vos yeux. Il faudra un peu de temps pour que vous rﺣ۸ussissiez ﺣ rﺣ۸gler correctement les deux potentiomﺣ۷tres (frﺣ۸quence du flash, vitesse du moteur), mais le rﺣ۸sultat final sera vraiment spectaculaireﺡ !
VI. Note de la rﺣ۸daction▲
Ce tutoriel est une traduction du livret d'accompagnement du kit de dﺣ۸marrage Arduino (document original disponible en licence Creative Commons BY-NC-SA) disponible sur le site http://astenor.free.fr/Arduino/. Le kit comprend une sﺣ۸lection de composants ﺣ۸lectroniques les plus courants et les plus utiles, accompagnﺣ۸e d'un livre de 15 projets. Depuis les bases de l'ﺣ۸lectronique, jusqu'ﺣ des projets plus complexes et intﺣ۸ressants, le kit vous aidera ﺣ contrﺣﺑler notre monde physique avec des capteurs et des actionneurs.
