


I. Introduction▲
Lorsque le piezo est plaquÃĐ contre une surface solide qui peut vibrer, comme un dessus de table en bois, votre Arduino peut dÃĐtecter l'intensitÃĐ d'un coup donnÃĐ contre cette surface. En utilisant cette information, vous pourrez dÃĐterminer si un nombre de coups frappÃĐs tombe dans une plage donnÃĐe à l'avance. Ainsi, dans le programme, vous pourrez compter et suivre ce nombre de coups afin de voir s'il correspond à votre paramÃĐtrage.
Un interrupteur vous permettra de dÃĐplacer le bras du servomoteur pour verrouiller votre serrure. Quelques LED vous permettront de connaÃŪtre la position du verrou : une LED rouge indiquera que la boÃŪte est verrouillÃĐe, tandis qu'une LED verte indiquera que la boÃŪte est dÃĐverrouillÃĐe. Enfin, une LED jaune vous permettra de savoir si un coup frappÃĐ sur la table a bien ÃĐtÃĐ pris en compte par votre montage.
Vous ÃĐcrirez ÃĐgalement votre propre fonction. Elle vous permettra de savoir si un coup a ÃĐtÃĐ frappÃĐ trop violemment ou trop faiblement. Ãcrire vos propres fonctions vous permet de rÃĐduire le temps passÃĐ Ã la programmation. En effet, cela permet de rÃĐutiliser du code au lieu de l'ÃĐcrire à de nombreuses reprises. Les fonctions peuvent prendre des arguments en entrÃĐe et retourner des valeurs en sortie. Dans le cas de ce projet, vous passerez à une fonction la mesure de l'intensitÃĐ d'un coup. Si ce coup est dans la bonne plage d'intensitÃĐ, ni trop fort, ni trop faible, vous incrÃĐmenterez une variable pour comptabiliser ce coup.
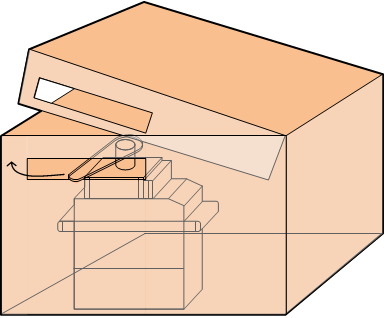
Il est possible de construire seulement le circuit, mais cela sera beaucoup plus amusant si vous l'utilisez comme un outil pour verrouiller quelque chose. Si vous avez une boÃŪte en bois ou en carton dans laquelle vous pouvez percer quelques trous, utiliser le bras du servomoteur, telle une serrure que vous verrouillerez ou dÃĐverrouillerez, afin d'empÊcher les autres personnes d'approcher vos prÃĐcieuses affaires.
II. IngrÃĐdients▲
|
|
|
|
|

|
|
|
RÃĐsistance 10Â kÎĐ |
RÃĐsistance 220Â ÎĐ |
RÃĐsistance 1Â MÎĐ |
Condensateur 100Â ÂĩF |
Piezo |
LED |
|
x1 |
x3 |
x1 |
x1 |
x1 |
x3 (rouge, vert, jaune) |
|
|
|

|
|
Interrupteur |
Servomoteur |
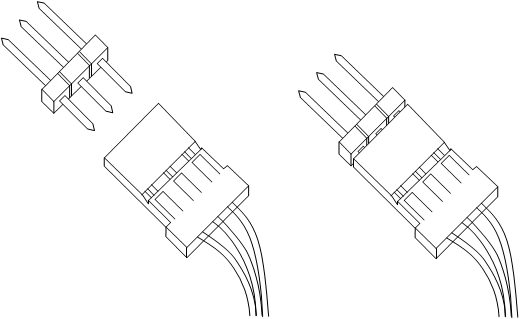
Connecteur à broches mÃĒles |
|
x1 |
x1 |
3 broches |
III. Construire le circuit▲
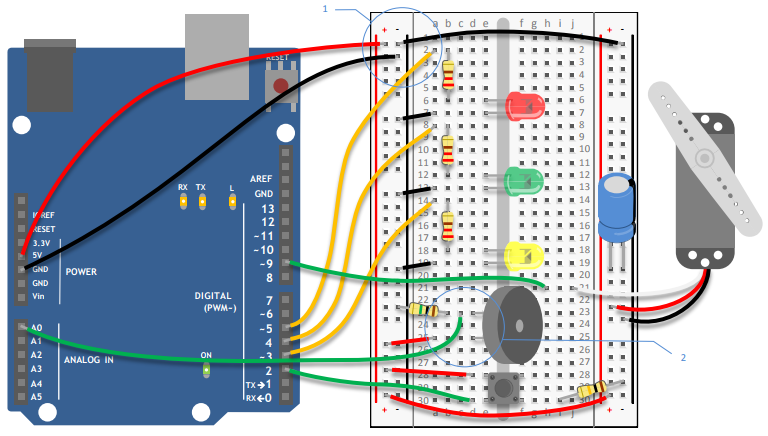
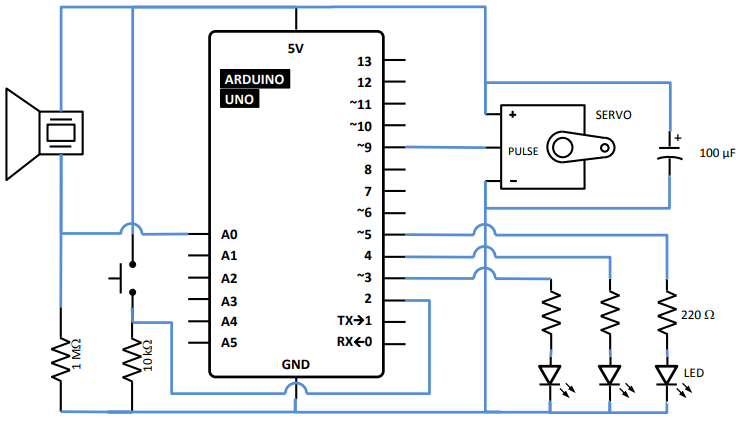
Il y a de nombreuses connexions sur la platine d'expÃĐrimentation, soyez attentif et veillez à bien suivre la maniÃĻre dont les ÃĐlÃĐments sont connectÃĐs entre eux.
- Connecter l'alimentation et la masse des deux cÃītÃĐs de la platine d'expÃĐrimentation. Placer le bouton poussoir et connecter un cÃītÃĐ au 5 V. Sur l'autre cÃītÃĐ de l'interrupteur, connecter la masse via une rÃĐsistance de 10 kÎĐ. Connecter aussi ce cÃītÃĐ de l'interrupteur à la borne 2 de l'Arduino.
- Enficher le piezo sur la platine d'expÃĐrimentation. Connecter une des bornes à l'alimentation. Si votre piezo a un fil rouge ou une borne marquÃĐe d'un signe ÂŦ + Âŧ, c'est cette borne qui doit Être connectÃĐe à l'alimentation. Si votre piezo n'indique pas de polaritÃĐ, alors vous pouvez le brancher dans le sens que vous voulez. Connecter l'autre borne du piezo à l'entrÃĐe Analogique 0 de votre Arduino. Enfin, placer la rÃĐsistance de 1 MÎĐ entre la masse et la borne du piezo connectÃĐe à A0. Des valeurs de rÃĐsistance moins ÃĐlevÃĐes rendraient le piezo moins sensible aux vibrations.
- CÃĒbler les LED, en connectant leur cathode (broche courte) à la masse, et en plaçant une rÃĐsistance de 220 ÎĐ en sÃĐrie avec chacune des anodes. à travers ces rÃĐsistances, connecter la LED jaune à la borne numÃĐrique 3 de l'Arduino, la LED verte à la borne numÃĐrique 4, et la LED rouge à la borne numÃĐrique 5.
- InsÃĐrer le connecteur à broches mÃĒles dans le connecteur femelle du servomoteur (voir Fig. 3). Connecter le fil rouge au +5 V, et le fil noir à la masse. Placer le condensateur chimique entre le +5 V et la masse, en s'assurant que la polaritÃĐ du condensateur est respectÃĐe, afin de lisser les irrÃĐgularitÃĐs de tension. Enfin, connecter la broche de donnÃĐes du servomoteur à la broche 9 de l'Arduino.
IV. Le programme▲
- DÃĐclaration de la bibliothÃĻque Servo
Vous avez besoin d'importer la bibliothÃĻque Servo et de crÃĐer une instance pour utiliser le servomoteur.
#include <Servo.h>
Servo monServo;- Constantes utiles
CrÃĐez les constantes qui dÃĐsignent vos broches d'entrÃĐes et de sorties.
const int brochePiezo = A0;
const int brocheInterrupteur = 2;
const int brocheLEDJaune = 3;
const int brocheLEDVerte = 4;
const int brocheLEDRouge = 5;- Variables stockant les ÃĐtats de l'interrupteur et du piezo
CrÃĐez les variables qui contiendront les ÃĐtats de votre interrupteur et du capteur piezo.
int etatInterrupteur;
int intensiteCoup;- Seuils limites des coups
DÃĐclarez des constantes qui dÃĐfiniront des seuils d'intensitÃĐ minimum et maximum, limites permettant de dÃĐterminer la validitÃĐ des coups.
const int coupFaible = 10;
const int coupFort = 100;- Variable stockant l'ÃĐtat de la serrure et le nombre de coups enregistrÃĐ
La variable estVerrouille permettra de savoir si la serrure est en position ÂŦ fermÃĐ Âŧ ou ÂŦ ouvert Âŧ. Un boolÃĐen (boolean) est un type de donnÃĐe qui peut Être soit 'vrai' (true, 1) ou 'faux' (false, 0). Au dÃĐmarrage, la serrure devra Être en position ÂŦ ouvert Âŧ.
La derniÃĻre variable globale contiendra le nombre de coups valides que vous aurez donnÃĐs.
boolean estVerrouille = false;
int nombreDeCoups = 0;- DÃĐfinition des directions des broches numÃĐriques et initialisation du port sÃĐrie et de l'objet reprÃĐsentant le servomoteur
Dans la fonction d'initialisation setup(), reliez le servomoteur à la broche 9.
DÃĐsignez les broches des LED comme des sorties et celle de l'interrupteur comme une entrÃĐe.
void setup() {
monServo.attach(9);
pinMode(brocheLEDJaune, OUTPUT);
pinMode(brocheLEDVerte, OUTPUT);
pinMode(brocheLEDRouge, OUTPUT);
pinMode(brocheInterrupteur, INPUT );- DÃĐverrouillage
Initialisez une communication sÃĐrie avec l'ordinateur. Ainsi, vous pourrez contrÃīler l'intensitÃĐ des coups reçus, connaÃŪtre la position actuelle de la serrure, et savoir combien de coups il reste à donner pour dÃĐverrouiller la boÃŪte.
Serial.begin(9600);Allumez la LED verte, dÃĐplacez le servomoteur afin de placer la serrure en position ÂŦ ouvert Âŧ. Enfin, affichez l'ÃĐtat courant de la serrure dans le moniteur sÃĐrie, en indiquant que la boÃŪte est dÃĐverrouillÃĐe.
digitalWrite(brocheLEDVerte, HIGH);
monServo.write(0);
Serial.println("La boÃŪte est dÃĐverrouillÃĐe!");
}- VÃĐrification de l'interrupteur
Dans la boucle loop(), vous allez commencer par vÃĐrifier si la boÃŪte est fermÃĐe ou non. Le rÃĐsultat va dÃĐterminer ce qui va se passer dans la suite du programme. Si elle n'est pas fermÃĐe, lisez l'ÃĐtat de l'interrupteur.
void loop() {
if (estVerrouille == false) {
etatInterrupteur = digitalRead(brocheInterrupteur);- Verrouillage
Si l'interrupteur est fermÃĐ (vous Êtes en train d'appuyer dessus !), passez la variable estVerrouille à true (vrai), pour indiquer que la serrure est verrouillÃĐe. Ãteignez la LED verte, et allumez la LED rouge. Si vous n'avez pas ouvert le moniteur sÃĐrie sur votre ÃĐcran d'ordinateur, l'ÃĐtat de ces LED sera une aide prÃĐcieuse qui vous permettra de connaÃŪtre la position de la serrure. Placez le servomoteur en position ÂŦ fermÃĐ Âŧ, et affichez un message dans le moniteur sÃĐrie indiquant que la boÃŪte est maintenant fermÃĐe. Ajoutez une courte pause afin que le servomoteur ait suffisamment de temps pour se placer dans la nouvelle position.
if (etatInterrupteur == HIGH) {
estVerrouille = true;
nombreDeCoups = 0;
digitalWrite(brocheLEDVerte, LOW );
digitalWrite(brocheLEDRouge, HIGH);
monServo.write(90);
Serial.println("La boÃŪte est verrouillÃĐe!");
delay(1000);
}
}- VÃĐrification du capteur de coups
Si la variable estVerrouille est true (vrai), la serrure est normalement en position ÂŦÂ fermÃĐÂ Âŧ, lisez la valeur de la vibration actuellement mesurÃĐe par le capteur piezo et enregistrez la valeur dans la variable intensiteCoup.
if (estVerrouille == true) {
intensiteCoup = analogRead(brochePiezo);- Comptage des coups valides
La prochaine ÃĐtape est de vÃĐrifier si vous avez reçu moins de trois coups valides, et qu'une vibration a ÃĐtÃĐ mesurÃĐe par le capteur. Si ces deux conditions sont vraies, vÃĐrifiez que le coup reçu est valide, et alors incrÃĐmentez la variable nombreDeCoups. C'est ici que vous allez appeler votre propre fonction verifierCoup(). Vous ÃĐcrirez cette fonction dÃĻs que vous aurez terminÃĐ d'ÃĐcrire le code de la fonction loop(), mais vous savez dÃĐjà que vous allez demander à cette fonction de dire si le coup est valide, donc passez-lui la variable intensiteCoup en argument. AprÃĻs avoir appelÃĐ votre fonction de vÃĐrification, affichez le nombre de coups encore nÃĐcessaires pour dÃĐverrouiller votre serrure.
2.
3.
4.
5.
6.
7.
if (nombreDeCoups < 3 && intensiteCoup > 0) {
if (verifierCoup(intensiteCoup) == true) {
nombreDeCoups++;
}
Serial.print(3-nombreDeCoups);
Serial.println(" supplÃĐmentaire(s) Ã donner");
}
- DÃĐverrouillage
VÃĐrifiez que vous avez reçu trois coups valides ou plus. Si c'est vrai, positionnez la variable estVerrouille à false (faux), et placez le servomoteur en position ÂŦ ouvert Âŧ. Attendez quelques millisecondes afin de lui laisser le temps d'initier le mouvement, puis modifiez l'ÃĐtat des LED verte et rouge. Affichez un message dans le moniteur sÃĐrie, indiquant que la boÃŪte est ouverte.
2.
3.
4.
5.
6.
7.
8.
if (nombreDeCoups >= 3) {
estVerrouille = false;
monServo.write(0);
delay(20);
digitalWrite(brocheLEDVerte, HIGH);
digitalWrite(brocheLEDRouge, LOW);
Serial.println("La boÃŪte est dÃĐverrouillÃĐe!");
}
Fermez l'instruction if() (si) et la fonction loop() avec une paire d'accolades.
}
}- DÃĐfinition d'une fonction pour vÃĐrifier la validitÃĐ d'un coup
Il est maintenant temps d'ÃĐcrire la fonction verifierCoup(). Quand vous ÃĐcrivez vous-mÊme des fonctions, vous avez besoin d'indiquer si elle retournera une valeur ou pas. Si la fonction ne doit pas retourner de valeur, vous la dÃĐclarez comme void (vide), comme c'est le cas pour les fonctions loop() et setup(). Si elle doit retourner une valeur, vous devez dÃĐclarer de quel type (int, long, float, etc.) est la valeur renvoyÃĐe. Dans notre cas, vous souhaitez vÃĐrifier si un coup est valide (vrai, true) ou pas (faux, false). Ainsi, dÃĐclarez la fonction comme ÃĐtant du type boolean (boolÃĐen).
Cette fonction traitera un nombre (votre variable intensiteCoup) et dÃĐterminera si sa valeur est valide ou pas. Pour transmettre la valeur à la fonction, vous crÃĐez un paramÃĻtre nommÃĐ par exemple intensite lorsque vous dÃĐclarez la fonction.
- VÃĐrification de la validitÃĐ d'un coup
Dans votre fonction, lorsque vous ferez rÃĐfÃĐrence au paramÃĻtre intensite, sa valeur correspondra au nombre passÃĐ comme argument dans le programme principal. Dans notre cas, la variable intensite contiendra la valeur contenue dans la variable intensiteCoup, et ce, quelle qu'elle soit.
VÃĐrifiez que le contenu de intensite est plus grand que la limite basse (coupFaible, indiquant un coup trop faible), et plus petite que la limite haute (coupFort, indiquant un coup trop violent).
boolean verifierCoup(int intensite) {- Indication qu'un coup est valide
Si le contenu de la variable intensite est compris entre ces deux valeurs, alors le coup est valide, câest-à -dire ni trop faible, ni trop fort. Faites clignoter la LED jaune une fois et affichez la valeur de l'intensitÃĐ du coup reçu dans le moniteur sÃĐrie.
if (intensite > coupFaible && intensite < coupFort) {
digitalWrite(brocheLEDJaune, HIGH);
delay(50);
digitalWrite(brocheLEDJaune, LOW );
Serial.print("Coup VALIDE, d'intensitÃĐ ");
Serial.println(intensite);- La fonction renvoie 'vrai' ( true )
Afin d'informer le programme appelant la fonction du rÃĐsultat de la comparaison, vous utiliserez la commande return, pour renvoyer true ('vrai'). Lorsque vous utilisez la commande return, vous terminez aussi l'exÃĐcution de la fonction. Une fois la commande return exÃĐcutÃĐe, vous revenez dans le programme ayant appelÃĐ la fonction, ici le programme principal.
return true;
}- Indication d'un coup invalide ; La fonction renvoie 'faux' ( false )
Si intensite est soit trop faible, soit trop forte, affichez la valeur de l'intensitÃĐ du coup reçu dans le moniteur sÃĐrie et renvoyez false ('faux') au programme principal.
Terminez votre fonction avec une derniÃĻre accolade.
2.
3.
4.
5.
6.
else {
Serial.print("Coup INVALIDE, d'intensitÃĐ ");
Serial.println(intensite);
return false;
}
}
V. Utilisez le montage▲
Lorsque vous branchez pour la premiÃĻre fois votre circuit à Arduino, ouvrez le moniteur sÃĐrie sur votre ordinateur. Il est possible qu'à la mise sous tension, vous entendiez le capteur piezo ÃĐmettre un petit ÂŦ clic Âŧ. Vous devriez aussi voir la LED verte s'allumer et le servomoteur se placer en position ÂŦ dÃĐverrouillÃĐ Âŧ. Enfin, le moniteur sÃĐrie devrait afficher ÂŦ La boÃŪte est dÃĐverrouillÃĐe ! Âŧ.
Appuyez briÃĻvement sur l'interrupteur, la LED verte s'ÃĐteint, la LED rouge s'allume et le servomoteur se place en position ÂŦ verrouillÃĐ Âŧ. Enfin, le moniteur sÃĐrie devrait afficher ÂŦ La boÃŪte est verrouillÃĐe ! Âŧ.
Comme on frappe à une porte, essayez de frapper doucement puis de plus en plus fort sur la surface à laquelle le capteur piezo est fixÃĐ (par exemple, la table ou le couvercle de la boÃŪte), afin de voir quelle force est nÃĐcessaire pour dÃĐclencher votre fonction. Vous saurez que cela fonctionne lorsque la LED jaune clignotera et que le moniteur sÃĐrie vous dira que vous avez donnÃĐ un coup valide, ainsi que son intensitÃĐ. Il affichera aussi le nombre de coups supplÃĐmentaires à donner afin de dÃĐverrouiller la boÃŪte.
Lorsque vous aurez atteint le nombre de coups ÂŦ valides Âŧ attendu, La LED rouge s'ÃĐteindra, la LED verte s'allumera, le servomoteur pivotera de 90 degrÃĐs, et le moniteur sÃĐrie vous indiquera que la serrure est dÃĐverrouillÃĐe.
Appuyez à nouveau sur l'interrupteur pour dÃĐmarrer un nouveau cycle.
 |
Les valeurs minimale (coupFaible) et maximale (coupFort) de l'intensitÃĐ de votre ÂŦ toc Âŧ idÃĐal peuvent Être diffÃĐrentes de celles donnÃĐes dans cet exemple. Cela dÃĐpend en effet d'un grand nombre de paramÃĻtres, comme le type de surface sur laquelle le capteur piezo est placÃĐ (carton, boisâĶ), la maniÃĻre dont le capteur est fixÃĐ sur cette surface (colle, ruban adhÃĐsif, ÃĐlastiqueâĶ), et bien entendu de la force avec laquelle le capteur est plaquÃĐ contre la paroi. Utilisez le moniteur sÃĐrie et l'exemple AnalogInSerialOut dans l'interface de dÃĐveloppement (aussi appelÃĐe IDE) de Arduino, afin de trouver les valeurs limites qui conviendront le mieux à votre montage. Vous pourrez trouver une explication dÃĐtaillÃĐe de cet exemple à l'adresse : http://www.arduino.cc/analogtoserial. |
1°) Pratiquez deux trous dans votre boÃŪte : un sur le cÃītÃĐ de la boÃŪte, et un autre sur le cÃītÃĐ du couvercle. Placez le servomoteur dans la boÃŪte de telle maniÃĻre que le bras puisse sortir et entrer librement au travers de ces deux trous lorsque la boÃŪte est fermÃĐe.
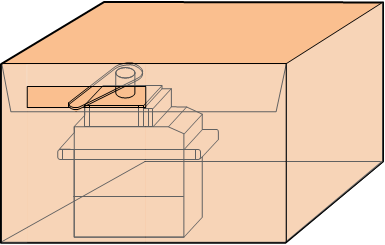
2°) Maintenez le servomoteur à cette place, par exemple à l'aide de ruban adhÃĐsif, en prenant encore une fois garde à ce que le bras puisse aisÃĐment pivoter à l'intÃĐrieur de la fente que vous avez pratiquÃĐe sur la boÃŪte.
 |
Ãcrire vos propres fonctions ne vous permet pas seulement de contrÃīler plus facilement le flot d'exÃĐcution de vos programmes. Elles les rendent aussi plus lisibles alors qu'ils deviennent de plus en plus complexes. Au cours du temps, comme vous ÃĐcrirez plus de programmes, vous pourrez vous rendre compte que vous avez ÃĐcrit un grand nombre de fonctions qui pourront Être rÃĐutilisÃĐes dans diffÃĐrents projets, rendant l'ÃĐtape de la rÃĐdaction du programme plus rapide et en parfaite adÃĐquation avec à votre style de programmation. |
 |
Cet exemple compte seulement le nombre de coups donnÃĐs, sans tenir compte du temps que cela prend. Vous pouvez commencer par complexifier cet exemple en crÃĐant un chronomÃĻtre avec l'instruction millis(). Utilisez le chronomÃĻtre pour dÃĐterminer si les coups sont reçus dans une pÃĐriode de temps donnÃĐe. Revenez au projet ÂŦ Montre NumÃĐrique Âŧ (#08) pour un exemple d'utilisation des chronomÃĻtres. Vous n'Êtes pas limitÃĐ Ã cette simple ÃĐvolution. Vous pouvez chercher à reconnaÃŪtre des combinaisons complexes de coups, basÃĐes sur l'intensitÃĐ des vibrations et le temps : par exemple, rechercher une combinaison de coups faibles et forts, en mesurant aussi le temps sÃĐparant deux coups successifs, et ceci pendant une pÃĐriode maximale dÃĐterminÃĐe. Il y a de nombreux exemples en ligne qui expliquent comment procÃĐder. Vous pouvez chercher ÂŦ Arduino knock lock Âŧ sur un moteur de recherche pour dÃĐcouvrir plus d'exemples sur ce type de projet. |
Les ÃĐlÃĐments piezo peuvent Être utilisÃĐs comme des entrÃĐes lorsqu'ils sont cÃĒblÃĐs en ponts diviseur de tension avec une rÃĐsistance de forte valeur. CrÃĐer une fonction est un moyen simple d'ÃĐcrire du code qui pourra Être rÃĐutilisÃĐ pour une tÃĒche spÃĐcifique.
VI. Note de la rÃĐdaction▲
Ce tutoriel est une traduction du livret d'accompagnement du kit de dÃĐmarrage Arduino (document original disponible en licence Creative Commons BY-NC-SA) disponible sur le site http://astenor.free.fr/Arduino/. Le kit comprend une sÃĐlection de composants ÃĐlectroniques les plus courants et les plus utiles, accompagnÃĐe d'un livre de 15 projets. Depuis les bases de l'ÃĐlectronique, jusqu'à des projets plus complexes et intÃĐressants, le kit vous aidera à contrÃīler notre monde physique avec des capteurs et des actionneurs.